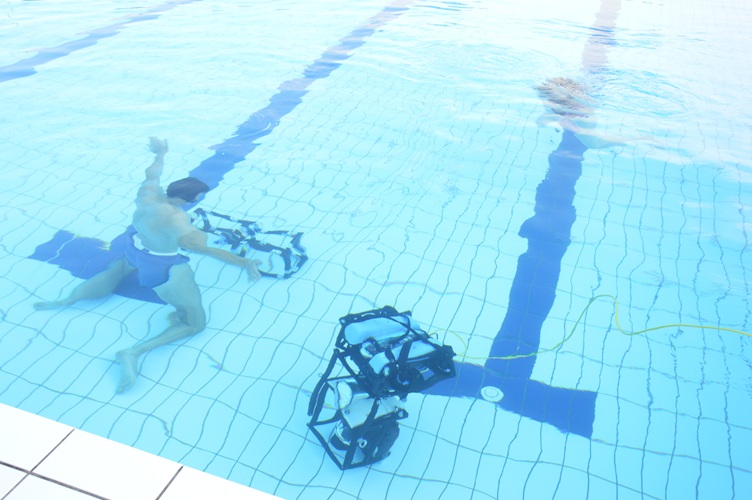
Tests of the developed prototype of the multi-sensor measuring system were carried out in a public swimming pool, during the evening after closing time, with the aim of testing the system on board of the Remotely Operated Vehicle, our undrwater dron the BluROV2 of BlueRobotics. Moreover the pilot system and maneuvering needed to be verified. Thanks to UISP Reggio Emilia these tests, necessary for the success of the following open water mission in Salento, were performed. Information about this collaboration was highlighted on local newspapers (reference 1, reference 2) for the advantage of the general public.
maneuvering and diving tests were carried out at swimming pool with the aim of allowing the pilot’s practice with the ROV equipped with the whole measuring system. The photogrammetric setup combined with the fluorimetry sensor prototype modified significantly the balance of the ROV. At the same time the operative functioning as well as the waterproof of all connections were verified before leaving for the open water mission.
All tests as well as the use in swimming pool for evaluating the operation and, later, in open water demonstrate the soundness of the approach and its applicability in real world marine ecological applications.